在世界空间下构造相机的世界矩阵
定义相机运动需要的几个参数
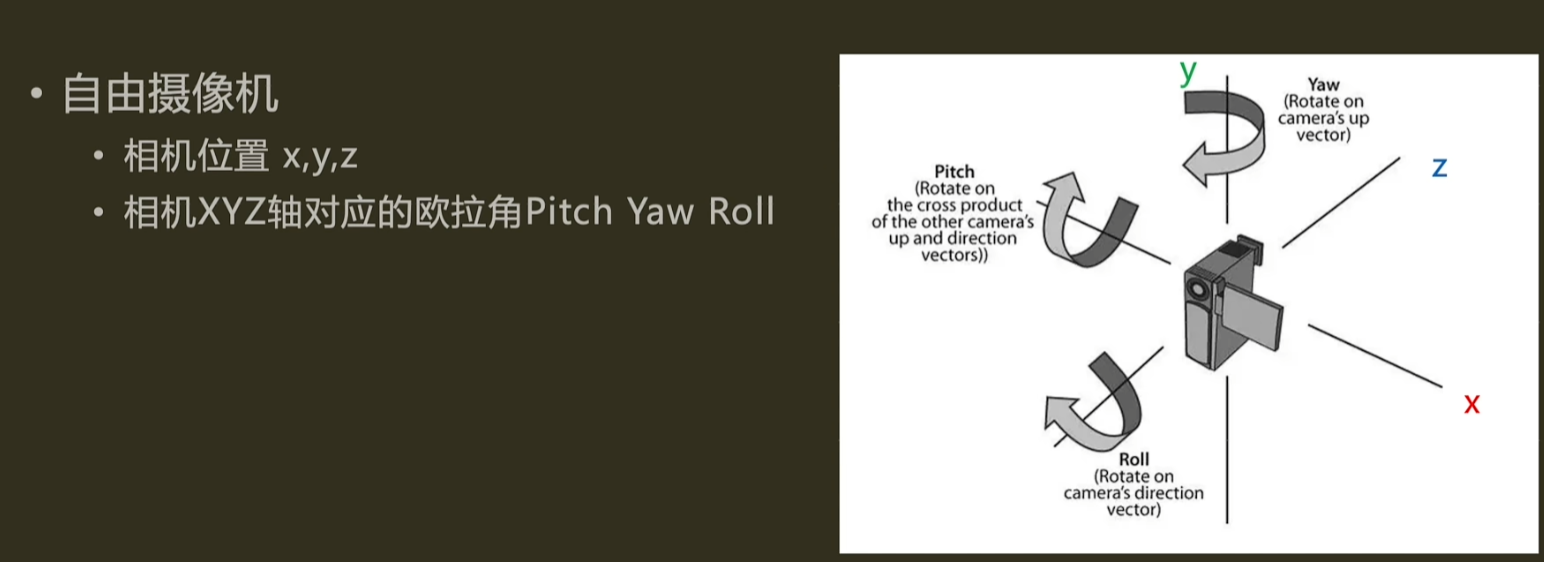
- 相机位置x, y, z
- 相机三个轴上的旋转角度,也就是欧拉角,一般把沿x轴旋转的角度叫做Pitch俯仰角,沿着y轴旋转的角度叫Yaw偏航角,以及沿着z轴的旋转角度叫Roll横滚角
- 这样定义的摄像机更适合做自由摄像机
- 而在做相机的目标追踪时,使用起来并不方便
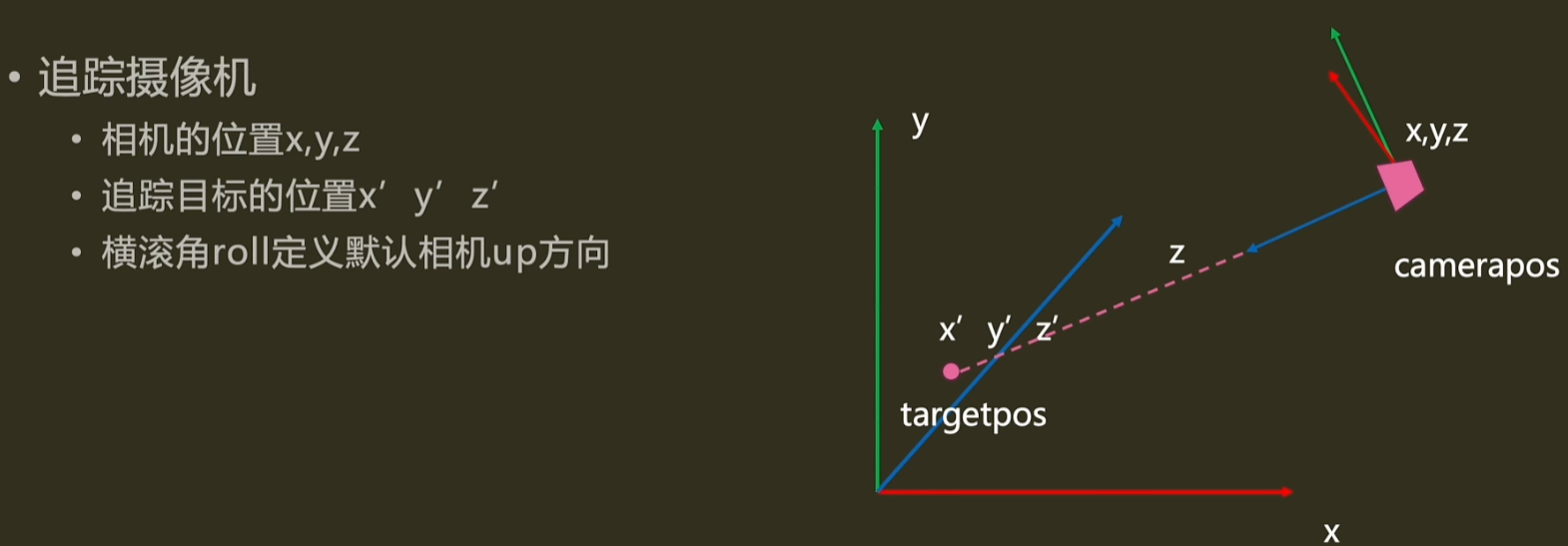
- 对于追踪摄像机,需要的是相机的位置X, Y, Z
- 目标追踪点的位置X’, Y’, Z’
- 由于目标点投影到视口平面后只是一个二维坐标,它只能影响相机沿X轴与Y轴的渲染角度,因此还需要一个变量来控制相机的横滚角度
- 一般情况下相机的横滚角默认为0,也就是相机一般不沿Z轴发生旋转,也就是Y轴朝上
- 不过为了完整性,还是可以通过定义Z旋转轴的Eular角来控制
实现
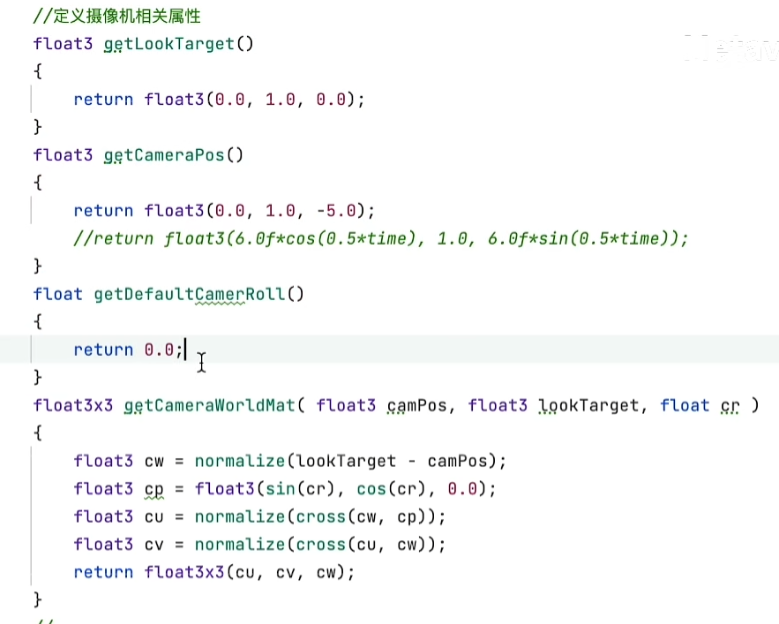
- 将追踪相机的两个矢量参数,一个欧拉角参数设置成函数形式
- 根据这三个参数构建相机的世界矩阵
- 构建相机的世界矩阵的函数中有四个中间变量
- cw为摄像机的朝向方向,也就是相机矩阵的Z轴正向,是由目标点位置减去相机点位置归一化后得到的
- cp为世界空间的Y轴正向,这里是由三角函数生成的,为的是方便应用欧拉角参数,默认的欧拉角设置为0,这样实际为float3(0, 1, 0),也就是世界空间的Y轴正向了
- 有了两个矢量就可以确定平面了,并可以通过两个矢量的叉乘来求垂直这个平面的向量
- cu和cv分别代表摄像机矩阵的X轴正向和Y轴正向,也就是屏幕空间下的U方向和V方向。注意叉乘顺序,Unity下是左手坐标系,摊开手掌四指指向的方向代表叉乘的第一个参数,这里也就是世界空间的Y轴正向,握拳四指卷向的方向为第二个参数,也就是Z轴正向,这时大拇指指向的方向就是要求的X轴正向了
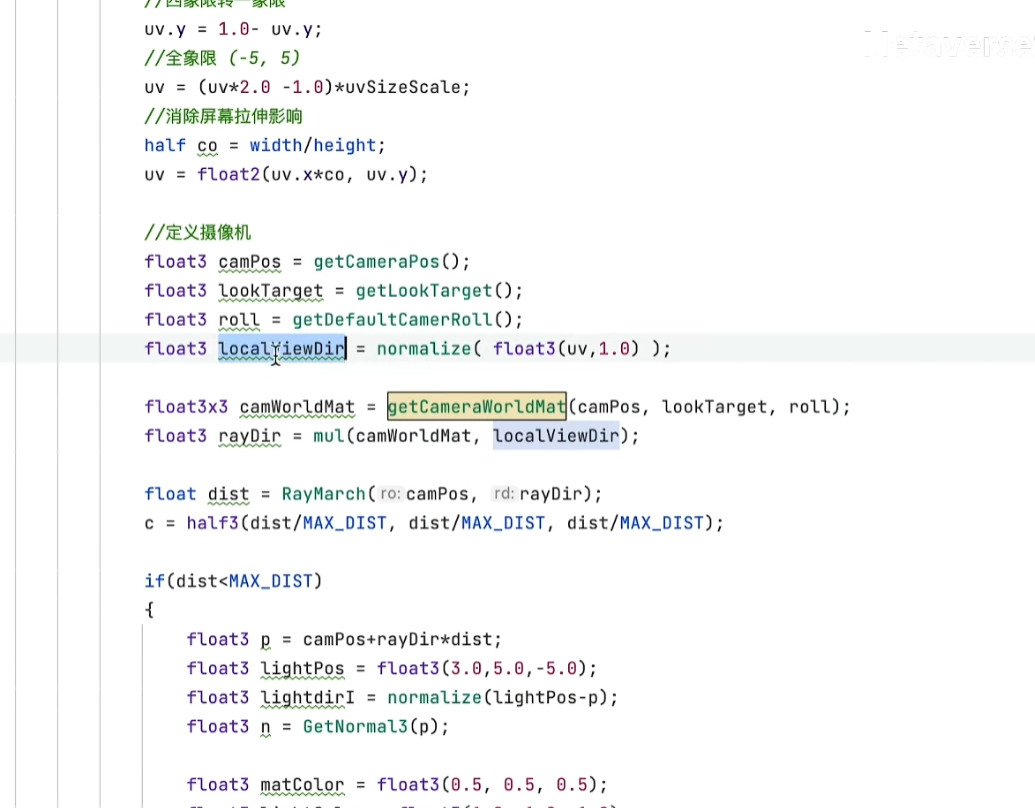
- 有了相机的世界矩阵,需要将矩阵与Ray marching射线步进方向进行组成,这样,3D空间下的成像与摄像机位置、目标点位置以及横滚角联系起来了

- 让摄像机看向(0, 1, 0)点,并做半径为6的圆周运动